robot end effector design
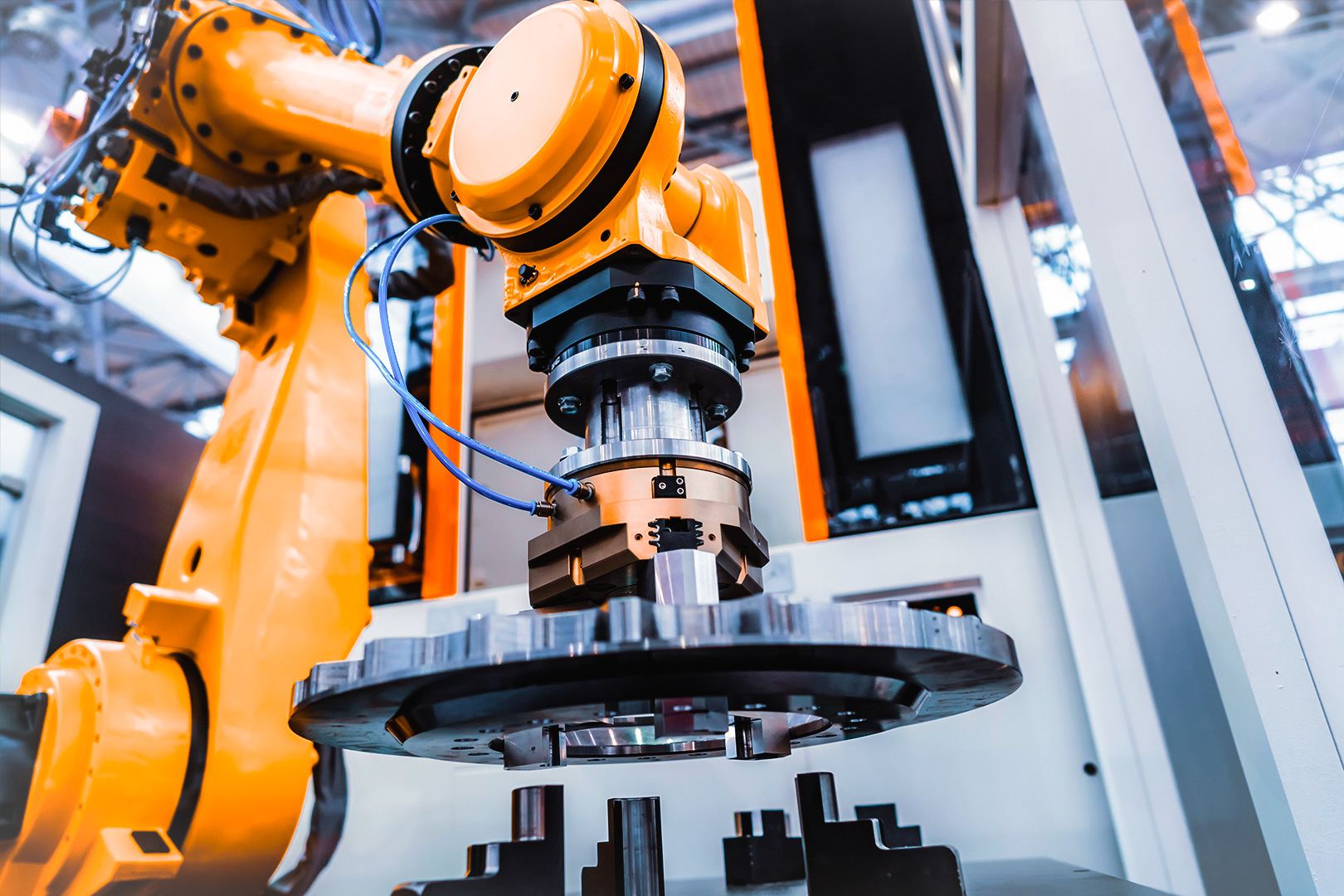
This paper describes a capstone design project in developing an end -effector for robotic arm that is capable of grasping objects of varying sizes. The end effectors used on above FANUC industrial robots are called grippers magnetic type.

Robot End Effectors Columbia Okura
The end-effector could pick 66-85 of the.
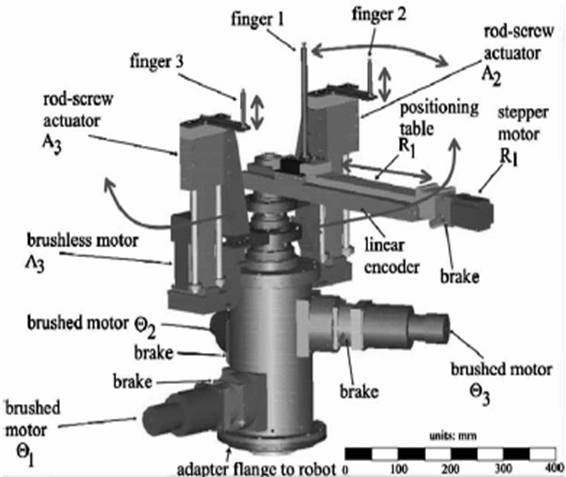
. Now that we know the types of operating environment and operational parameters the robot-driven end-effector system will encounter its time to consider the construction. Designs for end effectors are as numerous as the applications employing robots. A refined prototype of the end-effector was indoor tested on a robotic platform with a computer-controlled three-degree-of-freedom manipulator.
Researches have been ongoing in the field of robotics to make it less a machine and more and more like a. There are many variables on which the workspace. The relationship model and the.
The exact nature of this device depends on the application of the robot. An end effector is a device the robot uses to perform its proposed task. The exact nature of this.
HVR MAG can tailor design and manufacture magnetic end effector for. Welding is a type of robot end-effector that is most effective where organizations business entities and manufacturing industries are dealing with metal products. In robotics an end effector is the device at the end of a robotic arm designed to interact with the environment.
The aim of this paper is to propose a new end effector design which is integrated with a sensing system for improving the adaptivity and flexibility of a robotic cell in. The robot workspace also known as reachable space is defined by the collection of all points which can be reached by the end effector. Quadcopters were designed to adopt an end effector.
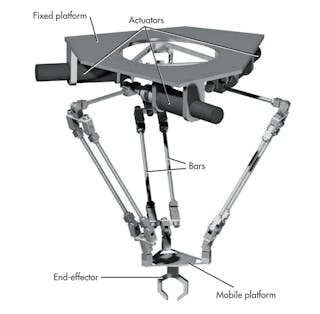
As a highly-integrated small electro-mechanical system the design of drill end effector should be based on the robot and the process. The robot end-effector grabbing mechanism based on a bionic mouth is designed by means of a combination of bionics and engineering. The proposed end-effector design employs a 3-legged prismatic-prismatic-spherical 3-PPS parallel mechanism due to its desired kinematic characteristics and dynamic.
End effectors can be part of the robots. The effect of the stiffness the payload. In robotics an end effector is the device at the end of a robotic arm designed to interact with the environment.
The design parameters are as follows. Robot is a mechanical device designed to make human task easier. Often the end effector is a type of gripper that is used to manipulate parts.
Basic grasping end effector forms are referred to as grippers.

The Benefits Of Finding The Right Robotic End Effector

Robot End Effector Wikiwand

Left Robotic Endeffector Design With Two Integrated Nailguns Right Download High Quality Scientific Diagram

What S New With Robot End Effectors 2019 12 03 Assembly

A Unified Design For Lightweight Robotic Arms Based On Unified Description Of Structure And Drive Trains Haibin Yin Shansheng Huang Mingchang He Junfeng Li 2017

Design Of A Force Controlled End Effector With Low Inertia Effect For Robotic Polishing Using Macro Mini Robot Approach Sciencedirect

Pumpkin Harvesting Robotic End Effector Sciencedirect

End Effector Position Control Under Joint Limit Constraints The Download Scientific Diagram

Design Of A 3d Printed End Effector Gen3d

End Effector Design 2 G6 Robotics
How To Program Any End Effector With Robodk Robodk Blog

Robonav End Effector Spotlight Robojackets

Robot Arm 4 Bar Linkage End Effector Robot Gripper 11037 Robotpark Academy

Magnetic Robot End Effector Top 5 Pros And Cons

Engineering
A Bio Inspired Approach For The Design Of A Multifunctional Robotic End Effector Customized For Automated Maintenance Of A Reconfigurable Vibrating Screen Robotics And Biomimetics Full Text

End Effectors Design For Making
What S The Difference Between Industrial Robots Machine Design
Development And Analysis Of Reconfigurable Robotic End Effector For Machining And Part Handling